
Robôs que manuseiam objetos de forma pré-programada não é novidade e são muito comuns em industrias. O grande problema deste tipo de máquina está relacionada a interação com novos objetos. Foi baseada nesta “dor” que o MIT desenvolveu robô capaz de manusear objetos de forma delicada. De forma bem simplificada, os pesquisadores criaram um sistema em que ensina robôs a avaliarem objetos desconhecidos, possibilitando a interação.
MIT desenvolveu robô inovador
Para ficar mais claro o avanço que esta nova invenção proporciona, vamos detalhar melhor como funciona o processo de criação destes robôs. Os engenheiros possuem, de maneira geral, duas opções quando desenvolvem robôs feitos para agarrar objetos: algoritmos de aprendizado específico de tarefa e de agarramento generalizado. O algoritmo de aprendizado específico da tarefa está relacionado a um trabalho específico, por exemplo, pegar um parafuso e colocá-lo em uma peça. Isto geralmente não é generalizável para outras tarefas. Já o agarramento generalizado permite aos robôs manusear objetos de diferentes formatos e tamanhos. Mas são limitados para executar tarefas mais complicadas, que exijam ajustes finos. Em suma, os sistemas de agarramento robótico atuais são básicos ou específicos demais. E é por isso que o sistema desenvolvido pelos pesquisadores do CSAIL (Laboratório de Ciência da Computação e de Inteligência Artificial do MIT do MIT) é bastante inovador.
O robô em ação
O sistema se chama Dense Object Nets – DON (Redes Densas de Objeto, em tradução livre). Essa rede neural gera uma impressão interna, ou um roteiro visual, de um objeto depois de uma breve inspeção visual, num tempo médio de 20 minutos. Isso permite ao robô ter uma ideia do formato do objeto. A partir daí o robô consegue realizar a tarefa de pegar o objeto — apesar de nunca tê-lo visto. Liderados por Peter Florence, os pesquisadores apresentarão essa pesquisa em outubro, na Conferência de Aprendizagem de Robô em Zurique, na Suíça.
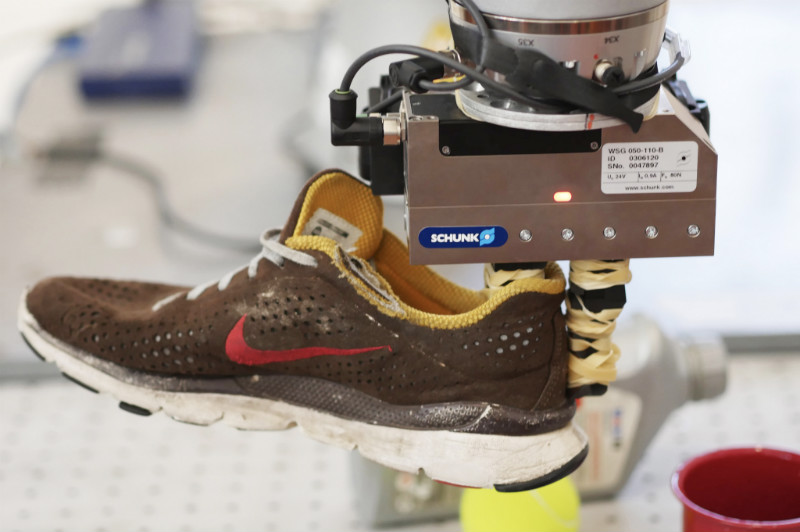
Uma vez que o treinamento é concluído, um operador humano pode apontar para um ponto específico em uma tela de computador, que diz ao robô em que parte do objeto ele deve pegar. Em testes, por exemplo, um braço robótico Kuka IIWA LRB levantou um sapato pela língua e um bicho de pelúcia pela orelha. O DON também é capaz de classificar objetos por tipo (sapatos, canecas e chapéus, por exemplo) e até de discernir exemplos específicos dentro de uma classe de objetos (como diferenciar um tênis marrom de um vermelho).
No futuro, uma versão mais sofisticada do DON poderia ser usada em diversas configurações, como coletando e organizando objetos em armazéns, trabalhando em ambientes perigosos e realizando tarefas de limpeza em casas e escritórios. Olhando adiante, os pesquisadores querem refinar o sistema de tal maneira que ele saiba onde agarrar em um objeto sem intervenção humana.
A robótica já é realidade há muitos anos e só evoluímos cada vez mais. Quem arrisca a dizer como serão os robôs daqui 20 anos? Leia mais sobre robótica aqui.
Fonte: MIT News



